|
I am a first-year Ph.D. student in Computer Science at National University of Singapore, advised by Prof. David Hsu. My research interest lies in the intersection of Robotics, Reasoning and Decision Making with their applications in complex, real-world environments. Previously, I worked as a Research Assistant with Prof. Max Q.-H. Meng . Before that, I was a visiting student at UC Berkeley from Aug. 2019 to Sep. 2020 working with Prof. Koushil Sreenath. I received my B.E. in Automation from the Harbin Institute of Technology, Shenzhen in 2021. I love playing basketball 🏀 and table tennis 🏓 in my free time. I am also open to collaborating with people to explore the possibilities of robotics in various fields. CV / Google Scholar / Github / Twitter / Personality |
|
My current research topics cover motion planning, assistive robotics, and autonomous system design. My long-term research goal is to develop intelligent robots that can infer and interact with the dynamic and open world in long-horizon tasks |
|
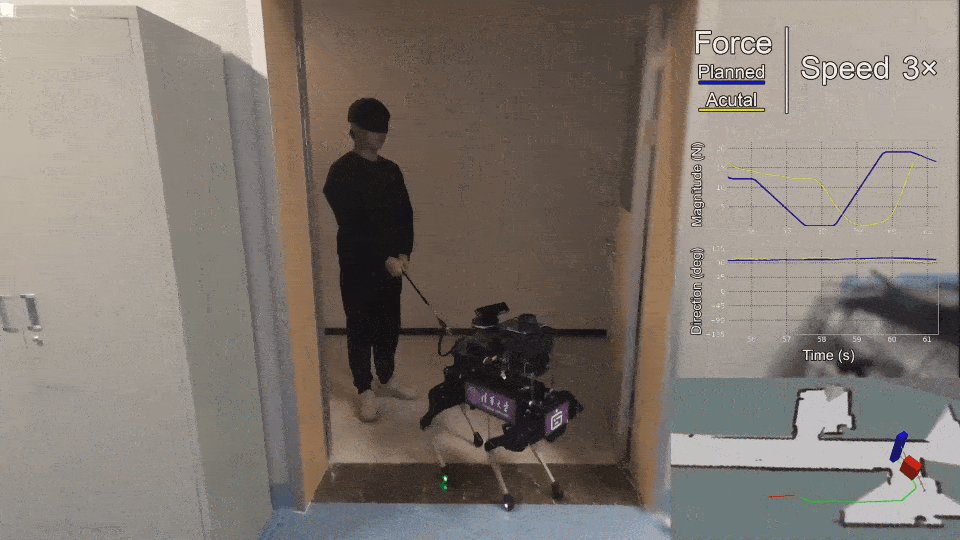
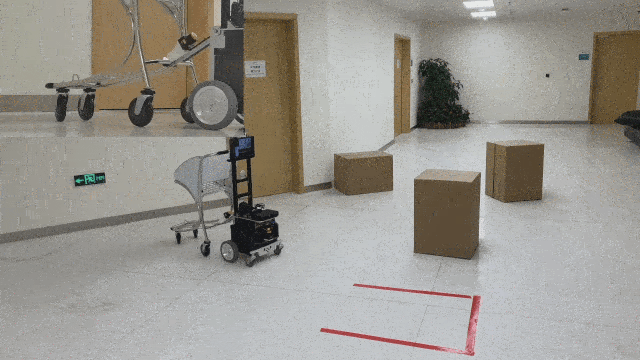
Yanbo Chen, Zhengzhe Xu, Zhuozhu Jian, Gengpan Tang, Yunong Yangli, Jialin He*, Xueqian Wang*, Bin Liang ICRA, 2023 arXiv / Video |
|
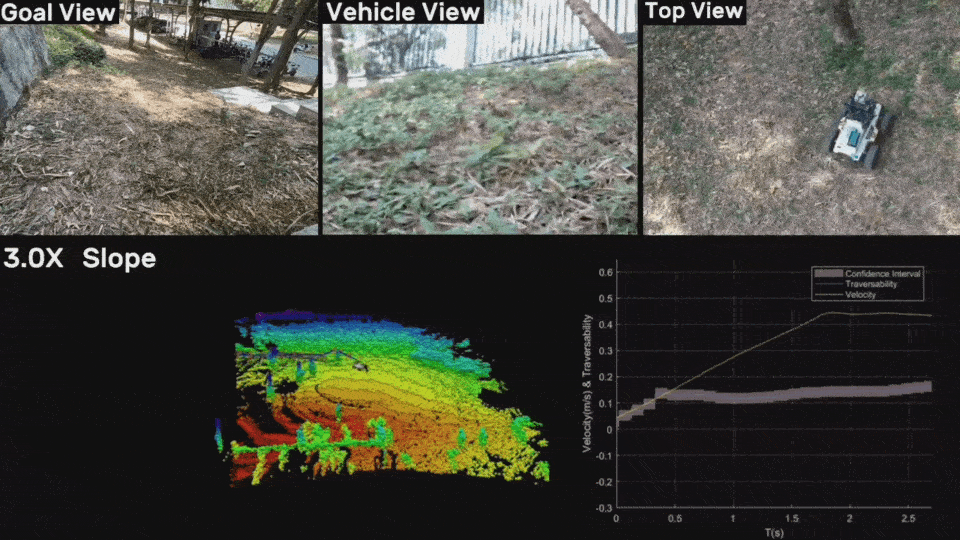
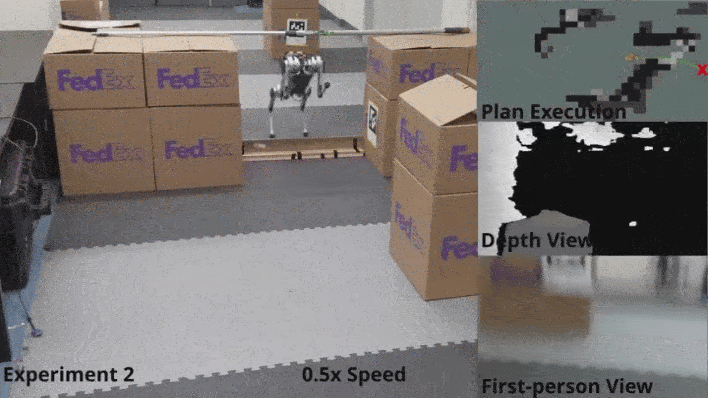
Zhuozhu Jian, Zihong Lu, Xiao Zhou, Bin Lan, Jialin He*, Xueqian Wang*, Bin Liang IROS, 2022 arXiv / Video |
|
Jialin He*, Hao Luan*, Ziqi Zhao*, Yue Hong, Jieting Zhao, Jiankun Wang, ICRA, 2022 arXiv / Video |
|
Scott Gilroy, Derek Lau, Lizhi Yang, Ed Izaguirre, Kristen Biermayer, Jialin He, Mengti Sun, Ayush Agrawal, Jun Zeng, Zhongyu Li, Koushil Sreenath International Conference on Automation Science and Engineering (CASE), 2021 arXiv / Video |

|
Jialin He*, Wenzhe Tong*, Lizhi Yang*, Jun Zeng, Zhongyu Li and Koushil Sreenath ICRA, 2021, Best Paper Award Finalist for Service Robotics. arXiv / VideoMedia: New Scientist / Daily Mail / The Independent / Tech Xplore / Daily Californian |
|
|
Yaqi Wu*, Jialin He*, Haoyao Chen, Shiwu Zhang and Yunhui Liu International Conference on Advanced Intelligent Mechatronics (AIM), 2020 arXiv |
|
NUS CS5340 Uncertainty Modelling in AI Utilized Markov Random Fields (MRF) to denoise forward-looking sonar (FLS) images and Bayesian optimization to estimate the odometry; Implemented the Monte Carlo Localisation algorithm for Autonomous Underwater Vehicles (AUVs) on data collected from AUVs operating in open water. |
|
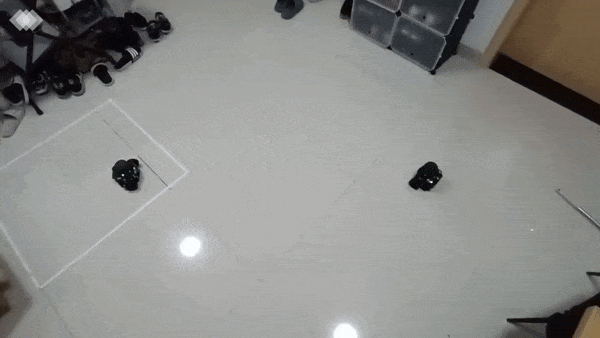
HIT Auto2012 Introduction to Maching Learning Designed training pipelines to solve reach-avoid games using the Soft Actor Criticism (SAC) algorithm; The model was trained in Robotarium simulations and transferred to real-world experiments; Learned policy performed better than the baseline MPC method and human policy in both defense and attack tasks. |
|
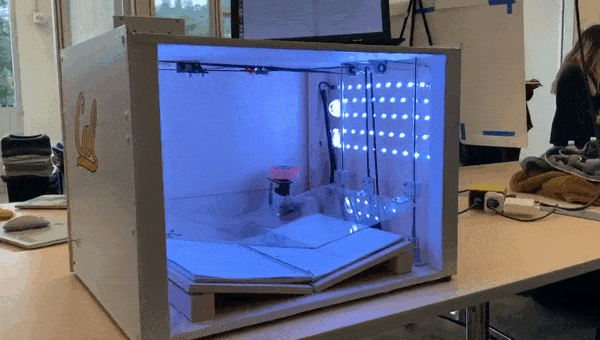
Berkeley ME102B Mechatronics Design Completed 3D model design in SolidWorks and manufactured parts of the scanner by 3D printing and laser cutting; Integrated electronics components to achieve autonomous page turning and scanning; Processed the scanner image with perspective transformation and adaptive threshold using OpenCV. |
Journal Reviewer:IEEE Robotics and Automation Letters (RA-L), 2022, 2023 IEEE Transactions on Robotics (T-RO), 2021 Biomimetic Intelligence and Robotics (BIROB), 2021Conference Reviewer:IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 IEEE International Conference on Robotics and Automation (ICRA), 2022, 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021Undergraduate Research Mentor:Quadruped Guidance Robot, Tsinghua University, 2021.9 – 2022.3 Plane-Fitting based Uneven Terrain Navigation Framework, Tsinghua University, 2021.9 – 2022.3 |
Erdös number:My Erdos number is 4 Jialin He -> Koushil Sreenath -> S. Shankar Sastry -> Béla Bollobás -> Paul ErdősMemberships:IEEE Student Member, IEEE Robotics and Automation Society Member |
|
Modified version of template from here Last updated: 11 June 2023 |